Рейтинг лучших роботов для дома
Содержание:
Так что же такое робот?
Исходя из приведенных выше определений, если бы мы захотели чёткой однозначности понятий, мы могли бы пойти двумя путями:
- расширительное толкование: считать роботами вообще всё, что подходит хоть под какой-то из перечисленных признаков;
- ограничительное толкование: не признавать роботами вообще ничего, что не соответствует строго всем признакам.
В первом случае ситуация не сильно изменится, в сравнении с имеющимся положением дел. Всё равно сейчас робототехники, условно говоря, как хотят, так и называют свои и чужие разработки.
Думаю, надо честно признать, что на данный момент мы не сможем придумать бесспорное, устраивающее всех определение понятия «робот», которому, к тому же, все будут неукоснительно следовать. Да оно и не нужно! Иначе, разговаривая с не подкованными теоретически людьми (заказчиками, коллегами, знакомыми), мы вынуждены будем постоянно их поправлять: «Нет, это не робот. А вот это, да, кажется робот… Если я не ошибаюсь… Подождите, проверю…» Это утомительно и отвлекает от других дел, полезных.
Итак, во-первых. На уровне обиходного использования вполне можно согласиться с интуитивной трактовкой неспециалистами понятия «робот» — рукотворной (искусственно созданной) сущности (механического устройства или компьютерной программы), которая движется, функционирует (выполняет работу, производит вычисления) без непосредственного присутствия человека.
Во-вторых. Для себя, мощных робототехников, нам будет полезно знать несколько типовых признаков, характеризующих (но не всегда определяющих) робот:
- приводной механизм — обязательный признак;
- программное управление — обязательный признак;
- выполнение поставленных человеком задач — обязательный признак;
- некоторая (большая или меньшая) автономность — а этот признак размыт даже в своей постановке и отражает, скорее, стремление к автономности.
И при этом мы помним, что в других областях могут быть собственные определения понятия «робот», такие как , родившееся в мире информационных технологий. Виртуальный мир — он вообще склонен переносить понятия из реального мира к себе, одновременно дополняя их своими, новыми смыслами.
Ну, и в-третьих. Для буквоедов и заядлых классификаторов приведём определение робота на основе , только немного исправленное:
Вот так. Пусть каждому будет своё, и все будут довольны.
В заключение, в качестве юмора, обращаю внимание на цитату, взятую к данной статье. Не кажется ли вам, что она очень забавно и точно отражает реальность? Действительно, на заводах работают манипуляторы, квартиры убирают пылесосы, в небе летают беспилотники, в космосе — спутники, а на Луну, планеты и астероиды высаживаются зонды, межпланетные станции и планетоходы
Роботы, на самом деле, гораздо раньше заняли место в нашей жизни, чем мы это заметили! Даже если их не называют роботами, имеет ли это для них значение? Нет, они просто делают свою работу
Так что пожелаем всяческих успехов разработчикам стандартов в их трудном и важном деле формулирования точных определений. Для нас же важнее делать нашу работу
К тому же, теперь мы немного ориентируемся и в терминологических дебрях.
- В связи с этим не могу не процитировать отрывок из ГОСТ Р 60.0.0.2-2016 «Роботы и робототехнические устройства. Классификация», раздел «4 Общие положения». Он того стоит: «В общем случае все устройства, принадлежащие к классу роботов,… подразделяются на две группы в зависимости от числа программируемых степеней подвижности и степени автономности: роботы (3.1) и робототехнические устройства (3.2). Однако в дальнейшем в настоящем стандарте и в других стандартах комплекса «Роботы и робототехнические устройства» термин «робот», если иное не оговорено особо, обозначает устройства, относящиеся к обеим этим группам, т.е. соответствующие как определению 3.1, так и определению 3.2.»
Это шедевр! В стандарте (!), устанавливающем классификацию (!!), сразу после введения терминологии (!!!) заявлено: классификация классификацией, а называть будем как хотим! - ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 «Роботы и робототехнические устройства. Термины и определения»
- См. .
- См. .
- См. , .
Но роботы бывают разные. Даже двуногие
Эксперты едины во мнении, что в будущем войны перейдут в новый формат: воевать будут только роботы. Такие разработки уже применяют армии США, Израиля и других стран.
BigDog для DARPA разрабатывается как раз как военный транспортировщик. В Южной Корее работают роботы-часовые, которые охраняют границу с Северной Кореей.
Компания MegaBots – лидер разработки боевых роботов в США. Недавно она показала гигантского боевого робота Eagle Prime. Управляют им два пилота из встроенной кабины. Масса робота – около 12 т, высота – больше 5 м.
Внутри – V-образный восьмицилиндровый мотор мощностью 430 лошадиных сил. Пушка и огромная клешня помогут Eagle Prime победить противников в боях роботов.
Главные соперники США – японцы. Один из самых крутых японских мехов – Kuratas. Да, мехи давно вышли за пределы компьютерных игр:
В России боевые роботы применяются более двух десятилетий. К примеру, в войне в Чечне в 2000 году робот «Вася» находил и обезвреживал радиоактивные вещества.
Роботы-разведчики «Гном» могут обезвреживать мины в толще воды и на дне. В состав комплекса «Уран» входят роботы для разведки и огневой поддержки.
Главная сложность здесь – нарушение фундаментальных законов робототехники: робот не может наносить вред человеку.
И при этом разработчики не гарантируют, что робот отличит солдат противника от мирных жителей, атакующих от сдающихся; поэтому финальную команду, которая может привести к нанесению телесных повреждений или убийству, всё равно отдаёт человек.
Немного определений: стандарты по робототехнике
Пойдем по порядку. Итак, слова «исполнительный механизм» говорят нам о том, что робототехники признают роботами только некие механические агрегаты, оснащенные приводами. Этим робототехники отличаются от программистов, которые могут называть роботом или ботом
В конце концов, вполне обычное дело, когда разные области знаний используют одни и те же слова для описания собственных смыслов. Пока просто запомним это разночтение.
Далее в ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 сказано про «определенную степень автономности», понимаемой как
Так все же, господа робототехники, роботы это или не роботы?
Кроме того, этакой несколько наивной формулировкой об «определенной степени автономности» разработчики стандарта как бы намекают на свою неспособность дать точное определение термину «робот». Что такое определенная степень автономности и кем она определена? Является ли признаком робота определенная полная автономность, или же определенная никакая — тоже? Впрочем, действительно, на этот вопрос однозначно не ответить, но, по крайней мере, отмечено стремление хоть к какой-нибудь автономности.
Далее имеем неточность в словах «способный перемещаться во внешней среде», так как перемещение представляет собой
Современный промышленный робот-манипулятор, который не изменяет своего местоположения в пространстве, но отвечает другим предъявленным требованиям (программируется по двум и более степеням подвижности и обладает определенной степенью автономности, особенно если, скажем, оснащен техническим зрением), должно быть, с удивлением узнает, что он роботом не является. Здесь была бы более точна формулировка из предшествующего ГОСТ Р ИСО 8373-2014 от ООО «НИИ экономики связи и информатики «Интерэкомс», который как раз и был заменен обсуждаемым более свежим стандартом, а именно: «движущийся внутри своей рабочей среды».
Кстати, в англоязычном оригинале это определение звучит так:
Мне кажется, коллеги из НИИ экономики связи и информатики лучше разобрались в роботах, чем коллеги из ЦНИИ робототехники. Шутка (зато термин «степень подвижности» от ЦНИИ РТК более уместен, чем «ось» от «Интерэкомс»). Но и в целом, ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 грешит подобными неточностями (где в переводе, а где и в робототехнической терминологии).
Зато в нём же приведена сноска с еще одним, чуть менее противоречивым, определением робота:
Мы обсудили свежие стандарты по робототехнике. А ведь ещё есть и более ранние. Правда, они были выпущены в 1980-х гг. и уже настолько устарели, что вовсе не помогут нам в понимании, что же такое современный робот.
Что ж, будем считать, что со стандартами стало яснее. А вот с роботами — нет. Какая-то путаница.
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений
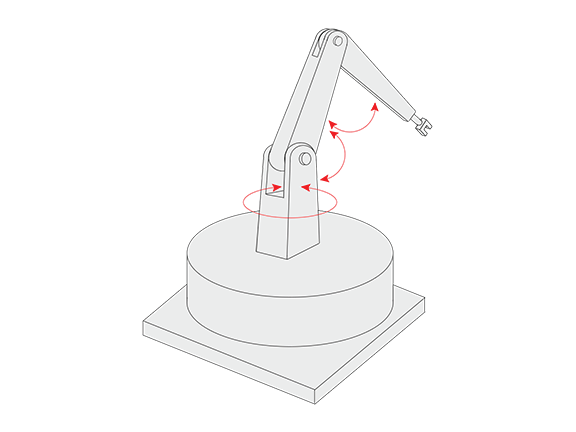
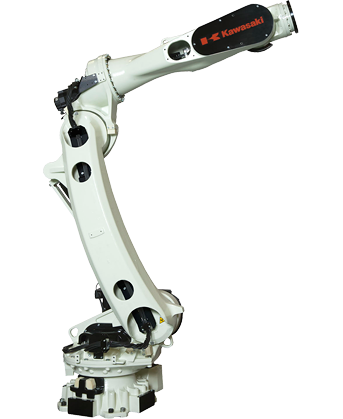
На фото универсальный робот Kawasaki CX210Lс грузоподъемностью 210 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
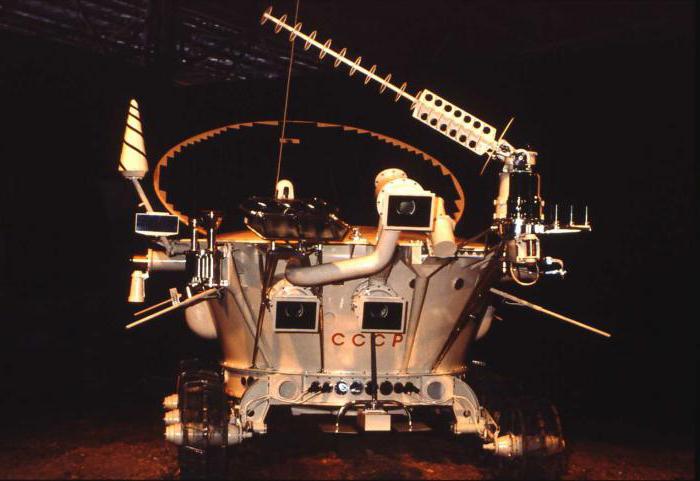
Русские автоматические космонавты
Официально начало робототехники в России датируется 1971 годом. Именно тогда она была официально признана наукой в СССР. Хотя к тому времени автоматы российского производства уже вовсю бороздили просторы космоса.
В 1957 году вышел на орбиту первый в мире искусственный спутник Земли. В 1966 году станция «Луна-9» передает на Землю радиосигнал с поверхности Луны, а аппарат «Венера-3», успешно достигнув планеты, установил там вымпел СССР.
Всего через четыре года запущены еще две лунные станции и обе выполнили свою миссию успешно. Аппарат «Луноход-1», доставленный станцией «Луна-17», проработал в три раза дольше, чем планировалось, и передал советским ученым множество ценнейшей информации.
В 1973 году еще одна станция этой же серии доставила на Луну еще один луноход, который также справился со своей задачей на отлично.
Стоит ли бояться роботов?
Самый главный страх человечества в отношении машин – это боязнь того, что они, став совершенными, однажды перестанут подчиняться и начнут жить своей жизнью, превратив в рабов уже людей. Этот страх шел рука об руку с развитием робототехники. Он находит свое выражение как в мифологии (например, еврейский миф о големе, восставшем против своего создателя), так и в искусстве. Известнейшие фильмы «Матрица», «Терминатор», великое множество книг, повествующих о восстании машин. Пьеса Карела Чапека, давшая жизнь слову «робот», также заканчивается порабощением человечества его бывшими слугами.
Однако на современном этапе развития науки эти страхи бессмысленны. У роботов отсутствует сознание, аналогичное человеческому, поэтому у них не может быть вообще никаких желаний, не говоря уже о стремлении захватить мир.
Для того чтобы воспроизвести сознание у машины, человеку необходимо сначала разобраться, что представляет собой его собственное сознание, как и из чего оно формируется. Ответ на этот вопрос кроется в глубинах человеческого мозга, который исследован еще далеко не полностью.
Для того чтобы «восстать», роботам необходимо понимать, что такое мировое господство и для чего им это нужно.
А до этого момента любая, даже самая сложная и совершенная машина принципиально ничем не отличается от кухонного комбайна или кофемолки. Поэтому вопрос о том, кто в итоге будет главным на Земле – робот или человек, пока не является насущным.
Хронология
- Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм — стопоход, обладающий высокой проходимостью.
- 1898 год — Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно.
- XX век
- 1921 год — чешский писатель Карел Чапек представил публике пьесу под названием «Р. У. Р.» («Россумские Универсальные Роботы»), откуда и взяло начало слово «робот» (от словацк. robota).
- 1930-е годы — появились конструкции внешне напоминающих человека устройств, способных выполнять простейшие движения и воспроизводить фразы по команде человека. Имеются подтверждённые данные о 38 подобных роботах, созданных преимущественно компанией Вестингауз (немецкими и голландскими инженерами) в целях рекламы. Первый такой «робот» Televox был сконструирован американским инженером Ройем Уэнсли (англ. Roy J. Wensley) для Всемирной выставки в Нью-Йорке в 1927 году.
- 1950-е годы — для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.
- 1960 год — дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
- 1968 год — японская компания Kawasaki Heavy Industries, Ltd. получила лицензию на производство робота от американской фирмы Unimation Inc. и собрала своего первого промышленного робота. С тех пор Япония начала неуклонное движение к тому, чтобы стать мировой столицей роботов — с более чем 130 компаниями, вовлечённых в их производство. Изначально сконструированные в США, первые роботы Японии импортировались в малых количествах. Инженеры изучали их и применяли в производстве в таких специфических работах, как сварка и распыление. В 70-х годах были разработаны многочисленные возможности практического применения в данной области.
- 1979 год — в МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01.
- 1980-е
- 1980 год — коммерческое начало для роботов, производимых на основе высоких технологий (Япония). С этого момента рынок начал расти.
- 1982 год — 18—27 октября 1982 года в Ленинграде, в выставочном комплексе в Гавани проходила (вероятно, первая в СССР) Международная выставка «Промышленные роботы-82».
- 1986 год — в Чернобыле впервые в СССР применены роботы для очистки радиоактивных отходов.
- 2000-е
В середине 2000-х Япония занимает первое место в мире и по экспорту промышленных роботов.
- 2007 год — МВД России в Перми проводило испытания тестового робота-милиционера Р-БОТ 001.
- 2010 год — в США в продажу поступили новые роботы PR2.
2010-е
- 2011 год — доставлен на МКС робот НАСА Робонавт-2.
- 2013 год — создан и доставлен на МКС первый японский робот-астронавт.
Роботы в России и в мире
Сначала разберемся в том, что считать роботами.
- Робот — это любая система, которая получает информацию, обрабатывает ее и выполняет какие-то действия, исходя из полученных данных.
- У робота обязательно есть датчики, исполнительные элементы, например манипулятор и микроконтроллер, который обрабатывает полученную информацию.
- Его можно перепрограммировать, чтобы он выполнял другие действия.
То есть кофемашина, созданная для выполнения определенной функции, к роботам не относится.
«Робот имеет широкий диапазон решений, и он может по-разному отреагировать на ту или иную ситуацию, — говорит Анастасия Сигинова, руководитель проектов компании „Аврора Роботикс“. — Например, в роботе-пылесосе заложена программа, он может объехать территорию и построить карту. Если у него будет стоять задача пылесосить в определенной комнате, то он найдет ее на своей карте и поедет именно туда».
Jelleke Vanooteghem / Unsplash
Анастасия Сигинова считает, что если механизмом управляют вручную, то это уже не робот, а управляемая машина. Хотя специалисты тоже спорят о том, что относить к роботам. В военной технике роботами называют любые механизмы с телеуправлением: например, если танком управляют из командного центра, то он уже считается роботом.Компания Sberbank Robotics ежегодно представляет анализ мирового рынка робототехники. В отчете за 2019 год говорится, что наибольшая роботизация промышленности сейчас в Южной Корее: там насчитывается 710 роботов на 10 тысяч человек на производстве. При этом среднемировой показатель — 85, в Китае — 97, а в России всего 4. С одной стороны, это говорит о том, что мы порядочно отстали в плане автоматизации, а с другой — в России есть большой потенциал для роста направления.
Алиса Конюховская и Валерия Цыпленкова в книге «Рынок робототехники: угрозы и возможности для России» пишут, что в области сервисной робототехники у российских производителей больше шансов занять лидирующие позиции на мировом рынке, так как российский и мировой рынки сейчас формируются. По данным Национальной ассоциации участников рынка робототехники (НАУРР), с 2015 по 2017 год продажи в российских компаниях росли на 50% в год. Лидирующие области сервисной робототехники в России — роботы для общественных мест, в образовании и медицине. Около 20% сервисных роботов экспортируется.
К тому же есть высокий интерес к робототехническим специальностям. За последние пять лет они регулярно попадают в различные списки наиболее востребованных инженерных профессий. По специальности «Мехатроника и робототехника» обучают в 30 вузах в 19 городах.
Ð Ð¾Ð±Ð¾Ñ Ð¸Ð³ÑÑÑка
Ðод ÑобоÑами игÑÑÑками Ð¼Ñ Ð¸Ð¼ÐµÐµÐ¼ в Ð²Ð¸Ð´Ñ Ð¼Ð¾Ð´ÐµÐ»Ð¸ Ñ ÑлекÑÑонной «наÑинкой» (а не ÑолÑко меÑаникой), коÑоÑÑе ÑпоÑÐ¾Ð±Ð½Ñ Ð½Ð° авÑономнÑе дейÑÑвиÑ. Ребенок командÑÐµÑ ÑобоÑом игÑÑÑкой пÑлÑÑом, голоÑом или ÑеÑез пÑиложение на ÑмаÑÑÑоне.
ÐоÑемÑ-Ñо болÑÑинÑÑво деÑей ÑвеÑенÑ, ÑÑо ÑÐ¾Ð±Ð¾Ñ Ð´Ð¾Ð»Ð¶ÐµÐ½ бÑÑÑ ÑеловекоподобнÑм. Ðо менÑÑей меÑе, Ñ Ð³Ð¾Ð»Ð¾Ð²Ð¾Ð¹ и ÑÑками. Ð ÑÑнок пÑÐµÐ´Ð»Ð°Ð³Ð°ÐµÑ ÑÑÑÑойÑÑва ÑамÑÑ ÑазнÑÑ ÑоÑм. Уже Ñла ÑеÑÑ Ð¾ копии дÑонов «ÐвезднÑÑ Ð²Ð¾Ð¹Ð½Â». ÐÑÑÑ Ð³Ð¾Ð½Ð¾ÑнÑе ÑилиндÑÑ Ð¸ ÑмнÑе ÑаÑÑ. ÐÑÑÑ ÑамолеÑÑ, авÑомобили и лодки. ÐÑÑÑ ÑобоÑÑ Ð¿Ð¾Ñожие на пÑомÑÑленнÑÑ ÑеÑникÑ.
https://youtube.com/watch?v=Zi-5hbaGmuQ
ÐÑе в XVII веке ÑÑедÑÑвами меÑаники пÑÑалиÑÑ Ð´ÐµÐ»Ð°ÑÑ Ð¸Ð³ÑÑÑки Ñ Ð¸Ð¼Ð¸ÑаÑией инÑеллекÑа. Ð XX веке поÑвилиÑÑ Ð¼ÑлÑÑимедийнÑе игÑÑÑки â они пÑинадлежали компании Walt Disney. Ðдин из пеÑвÑÑ ÑеÑийнÑÑ ÑобоÑов игÑÑÑек â амеÑиканÑкий Teddy Ruxpin. ТÑÑдно повеÑиÑÑ, но он поÑвилÑÑ Ð² пÑодаже еÑе в 1980 годÑ. ÐеÑмоÑÑÑ Ð½Ð° внеÑноÑÑÑ Ð¼Ñгкой игÑÑÑки, ÑÑо наÑÑоÑÑий ÑÐ¾Ð±Ð¾Ñ Ñо Ñложной (в Ñо вÑемÑ) по ÑлекÑÑонной наÑинкой.

РоÑлиÑие Ð¾Ñ Ð¾Ð±ÑÑнÑÑ Ð¸Ð³ÑÑÑек, ÑобоÑов оÑнаÑаÑÑ Ð¿ÑоÑеÑÑоÑом, памÑÑÑÑ, двигаÑелÑми и даÑÑиками. РобоÑÑ ÑабоÑаÑÑ Ð¾Ñ Ð°ÐºÐºÑмÑлÑÑоÑов или баÑаÑеек. ÐекоÑоÑÑе модели вÑполнÑÑÑ Ð±Ð¾Ð»ÐµÐµ 100 ÑÑнкÑий:
- движÑÑÑÑ Ð¿Ð¾ ÑложнÑм ÑÑаекÑоÑиÑм;
- поддеÑживаÑÑ ÑавновеÑие;
- ÑеагиÑÑÑÑ Ð½Ð° окÑÑжаÑÑий Ð¼Ð¸Ñ Ð¸ взаимодейÑÑвÑÑÑ Ñ Ð½Ð¸Ð¼;
- пÑоигÑÑваÑÑ Ð·Ð²Ñки и мелодии, подаÑÑ ÑвеÑовÑе ÑигналÑ.
УдивиÑелÑно, но и в англо-, и в ÑÑÑÑкоÑзÑÑном инÑеÑнеÑе болÑÑÐ°Ñ Ð¿ÑÑаниÑа Ñ Ð¾Ð¿Ñеделением и клаÑÑиÑикаÑией игÑÑÑеÑной ÑлекÑÑоники. ÐÑди ÑаÑÑо пÑÑаÑÑ ÑобоÑов игÑÑÑек Ñ Ð¾Ð±ÑазоваÑелÑнÑми и ÑазвиваÑÑими моделÑм. ХоÑÑ, и здеÑÑ ÑазниÑа неÑколÑко ÑазмÑÑа, Ñак как пÑи внимаÑелÑном иÑÑледовании ÑовÑеменного ÑобоÑа Ñебенок неÑомненно ÑÑановиÑÑÑ Ñмнее.
«ÐÑÑÑÑе» модели взаимодейÑÑвÑÑÑ Ð´ÑÑг Ñ Ð´ÑÑгом, делаÑÑ Ð²ÑÐ²Ð¾Ð´Ñ Ð¸Ð· ÑобÑÑвеннÑÑ Ð´ÐµÐ¹ÑÑвий, ÑÑаÑÑÑ Ð½Ð¾Ð²Ð¾Ð¼Ñ Ð¸ адапÑиÑÑÑÑÑÑ Ð¿Ð¾Ð´ возможноÑÑи владелÑÑа.
СоглаÑно иÑÑÐ»ÐµÐ´Ð¾Ð²Ð°Ð½Ð¸Ñ ÐºÐ¾Ð¼Ð¿Ð°Ð½Ð¸Ð¸ GfK Australia ÑобоÑÑ Ð²ÑодÑÑ Ð² ÑиÑло ÑамÑÑ Ð¿Ð¾Ð¿ÑлÑÑнÑÑ Ð¸Ð³ÑÑÑек в миÑе.
РобоÑоÑеÑника
- РобоÑÑ (ÑобоÑоÑеÑника)
- РобоÑоÑеÑника (миÑовой ÑÑнок)
- ÐбзоÑ: РоÑÑийÑкий ÑÑнок пÑомÑÑленной ÑобоÑоÑеÑники 2019
- ÐаÑÑа ÑоÑÑийÑкого ÑÑнка пÑомÑÑленной ÑобоÑоÑеÑники
- ÐÑомÑÑленнÑе ÑобоÑÑ Ð² РоÑÑии
- Топ-30 инÑегÑаÑоÑов пÑомÑÑленнÑÑ ÑобоÑов в РоÑÑии
- ÐаÑÑа ÑоÑÑийÑкого ÑÑнка пÑомÑÑленной ÑобоÑоÑеÑники: 4 клÑÑевÑÑ ÑегменÑа, 170 компаний
- ТеÑнологиÑеÑкие ÑенденÑии ÑазвиÑÐ¸Ñ Ð¿ÑомÑÑленнÑÑ ÑобоÑов
- РпÑомÑÑленноÑÑи, медиÑине, боевÑе (ÐибеÑвойнÑ)
- СеÑвиÑнÑе ÑобоÑÑ
- Collaborative robot, cobot (ÐоллабоÑаÑивнÑй ÑобоÑ, кобоÑ)
- IoT — IIoT — ЦиÑÑовой двойник (Digital Twin)
- ÐомпÑÑÑеÑное зÑение (маÑинное зÑение)
- ÐомпÑÑÑеÑное зÑение: ÑеÑнологии, ÑÑнок, пеÑÑпекÑивÑ
- Ðак ÑобоÑÑ Ð·Ð°Ð¼ÐµÐ½ÑÑÑ Ð»Ñдей
- СекÑ-ÑобоÑÑ
- ÐÑкÑÑÑÑвеннÑй инÑÐµÐ»Ð»ÐµÐºÑ (ÐÐ, Artificial intelligence, AI)
- ÐбзоÑ: ÐÑкÑÑÑÑвеннÑй инÑÐµÐ»Ð»ÐµÐºÑ 2018
- ÐÑкÑÑÑÑвеннÑй инÑÐµÐ»Ð»ÐµÐºÑ (ÑÑнок РоÑÑии)
- ÐÑкÑÑÑÑвеннÑй инÑÐµÐ»Ð»ÐµÐºÑ (миÑовой ÑÑнок)
- ÐÑкÑÑÑÑвеннÑй инÑÐµÐ»Ð»ÐµÐºÑ (ÑÑнок УкÑаинÑ)
- РбанкаÑ, медиÑине, Ñадиологии, ÑиÑейле, ÐÐÐ, обÑазовании, ÐвÑопилоÑ, ÑÑанÑпоÑÑе, логиÑÑике, ÑпоÑÑе, СÐРи лиÑеÑаÑÑÑа, видео (DeepFake, FakeApp), мÑзÑке
- ÐаÑионалÑÐ½Ð°Ñ ÑÑÑаÑÐµÐ³Ð¸Ñ ÑазвиÑÐ¸Ñ Ð¸ÑкÑÑÑÑвенного инÑеллекÑа
- ÐаÑионалÑÐ½Ð°Ñ ÐÑÑоÑиаÑÐ¸Ñ ÑÑаÑÑников ÑÑнка ÑобоÑоÑеÑники (ÐÐУРР)
- РоÑÑийÑÐºÐ°Ñ Ð°ÑÑоÑиаÑÐ¸Ñ Ð¸ÑкÑÑÑÑвенного инÑеллекÑа
- ÐаÑионалÑнÑй ÑенÑÑ ÑазвиÑÐ¸Ñ ÑеÑнологий и базовÑÑ ÑлеменÑов ÑобоÑоÑеÑники
- ÐеждÑнаÑоднÑй ЦенÑÑ Ð¿Ð¾ ÑобоÑоÑеÑнике (IRC) на базе ÐÐТУ ÐÐСиС
Robot Control Meta Language (RCML)
- ÐаÑинное обÑÑение, ÐÑедоноÑное маÑинное обÑÑение, РазмеÑка даннÑÑ (data labeling)
- RPA — РобоÑизиÑÐ¾Ð²Ð°Ð½Ð½Ð°Ñ Ð°Ð²ÑомаÑизаÑÐ¸Ñ Ð¿ÑоÑеÑÑов
- ÐидеоаналиÑика (маÑинное зÑение)
- ÐаÑиннÑй инÑеллекÑ
- ÐогниÑивнÑй компÑÑÑинг
- ÐаÑка о даннÑÑ (Data Science)
- DataLake (ÐзеÑо даннÑÑ)
- BigData
- ÐейÑоÑеÑи
- ЧаÑбоÑÑ
- УмнÑе колонки ÐолоÑовÑе помоÑники
- ÐезÑкипажное ÑÑдовождение (ÐÐС)
- ÐвÑÐ¾Ð¿Ð¸Ð»Ð¾Ñ (беÑпилоÑнÑй авÑомобилÑ)
- ÐеÑпилоÑнÑе гÑÑзовики
- РмиÑе и РоÑÑии
- ÐеÑаÑÑие авÑомобили
- ÐлекÑÑомобили
ÐеÑпилоÑнÑй леÑаÑелÑнÑй аппаÑÐ°Ñ (дÑон, ÐÐÐÐ)
Какой робот в мире самый крутой? Atlas!
Группа инженеров Массачусетского технологического института в 1992 году создала компанию Boston Dynamics. В 2013 году её купила Google, но спустя три года продала Boston Dynamics компании SoftBank – дескать, в ближайшие три года коммерчески успешных роботов ждать не стоит.
SoftBank, которая ранее поглотила разработчика процессоров ARM, в перспективы Boston Dynamics поверила. И компания всё же стала лидером в сфере робототехники, доказав: не всё можно измерить коммерческим успехом.
Atlas движется лучше нас с вами. Он уже научился ходить, бегать по лесу, отжиматься, даже запрыгивать на ступени. И стал первым роботом, который умеет делать сальто назад:
Параллельно с Atlas инженеры работают над роботизированными животными: роботами-собаками Spot, Spot Mini, BigDog и LittleDog, самым быстрым в мире четвероногим роботом Cheetah и др.
Значительную часть роботов создают для DARPA – Управления перспективных исследований Минобороны США.
Космонавт Shapeshifter
Исследование Титана, спутника Сатурна, уже не за горами — для этой цели создали робота Shapeshiftera. Жесткие условия среды заставляют всячески изощряться, потому что человек не сможет находится среди криовулканов, под дождем из жидкого метана, на берегу водоемов из охлажденных углеводородов.

Shapeshifter задумали как конструкцию из множества маленьких роботов в форме шара. У каждого будет свой источник энергии и предназначение. Этот проект пока в стадии активных разработок.
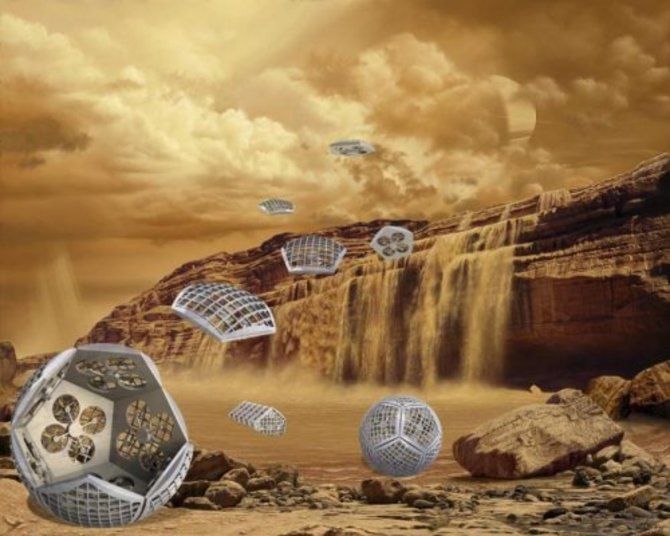
Один вопрос возникает в ходе таких изобретений: останется ли место человеку среди совершенных машин? Кстати, мы в Joy-pup о летающих машинах уже писали.
Отечественная робототехника
История робототехники в России, также как и в Европе, насчитывает не одно столетие. С некоторого времени российские ученые не отстают от своих европейских коллег в конструировании различных автоматов: в последней трети XVIII века в России создается машина для вычислений, названная машиной Якобсона, а в 1790 году Иван Петрович Кулибин создает свои знаменитые «яичные» часы. В них были встроены несколько человеческих фигурок, которые выполняли определенные действия, также часы играли гимн и другие мелодии.

Именно русские ученые совершили несколько знаковых для истории робототехники открытий. Семен Николаевич Корсаков в 1832 году заложил основы информатики. Он разработал несколько машин, способных производить интеллектуальные вычисления, применив для их программирования перфокарты.
Борис Семенович Якоби в 1838 году изобрел и испытал первый электромотор, принципиальная конструкция которого остается актуальной и поныне. Якоби, установив его на лодку, совершил с его помощью прогулку по Неве.
Академик П. Л. ЧебышевВ 1878 г. представил первый прототип шагающего транспортного средства – стопоходящую машину.
М. А. Бонч-Бруевич изобрел в 1918 году триггер, благодаря чему стало возможным создание первых компьютеров, а В. К. Зворыкин чуть позже демонстрирует электронную трубку, давшую начало телевидению.
Первая ЭВМ появляется в СССР в 1948 году, а уже в 1950-м выпущена МЭСМ (малая электронная счетная машина), на тот момент самая быстрая в Европе.
Официально историю робототехники в России можно отсчитывать с 1971 года. Тогда в Московском высшем техническом училище имени Баумана создается кафедра специальной робототехники и мехатроники, которую возглавляет академик Е. П. Попов. Он стал создателем отечественной школы инженерной робототехники.
Отечественная наука достойно конкурировала с зарубежной. Еще в 1974 году советский компьютер стал чемпионом мира на шахматном турнире среди машин. А созданный в 1994 году суперкомпьютер «Эльбрус-3» вдвое превосходил по скорости работы самый мощный американский компьютер того времени. Однако он не был пущен в серийное производство, возможно, из-за тяжелой ситуации в стране на тот момент.
Есть даже такие роботы, которых не разглядеть
Нанороботы, или наноботы — самые мелкие представители отрасли. Их разрабатывают, к примеру, для доставки лекарственных веществ непосредственно к заболевшим органам или очагам инфекций.
Кроме того, молекулярные машины могут вести подсчёт молекул в отдельных образцах или отслеживать химические процессы в автомобилях. Разрабатывают и нанороботов, которые смогут помещать сперматозоид в яйцеклетку:
Роботы размером в несколько нанометров примитивны и лишены электроники, но свою функцию выполняют. Правда, пока речь идёт о лабораторных разработках, а не о промышленных образцах.