Радары ссср
Содержание:
Современное состояние
По Договору об ограничении систем противоракетной обороны 1972 года требовалось, чтобы РЛС раннего предупреждения располагались на окраинах национальной территории и были направлены вовне. С развалом СССР в 1991 году многие станции оказались в независимых государствах.
Первым должен был закрыться узел в Скрунде. В соответствии с соглашением от 1994 года между Российской Федерацией и Латвией, две станции «Днепр» прекратили работу в 1998 году и были ликвидированы к концу 1999 года.
В 1992 году РФ подписала на 15-летний срок договор с Украиной об использовании станций «Днепр» под Севастополем и Мукачево. Станции обслуживались украинским персоналом, а полученная информация отправлялась в Главный центр СПРН в Солнечногорске. За эту информацию Россия ежегодно перечисляла Украине, по разным данным, от 0,8 до 1,5 млн долларов. В 2008 году РФ объявила о выходе из соглашения с Украиной. 26 февраля 2009 года РО-4 и РО-5 прекратили передачу сигнала на командный пункт (заменившая их РЛС «Воронеж» в Армавире заступила на боевое дежурство в том же году). Украинское правительство объявило о поддержании крымской РЛС в рабочем состоянии до ввода в строй перспективной системы контроля космического пространства, но станция оставалась в заброшенном состоянии. В октябре 2014 года, после присоединения Крыма к России, командующий войсками Воздушно-космической обороны генерал-лейтенант Александр Головко заявил, что РЛС «Днепр» под Севастополем будет модернизирована и заступит на боевое дежурство в 2016 году. Однако позже её восстановление было признано нецелесообразным. В 2017 году генеральный конструктор СПРН Сергей Боев объявил, что в Крыму планируется разместить новейшую радиолокационную станцию «Воронеж-СМ», которая существенно усилит возможности РЛС «Воронеж-ДМ» в Армавире.
Таким образом, на начало 2014 года из установленных в шести разных местах РЛС функционировали три — Сары-Шаган, Мишелёвка и Оленегорск. Станция в Казахстане остаётся единственной действующей за пределами РФ. Она была модернизирована и находится в ведении ВВКО. Её заменит РЛС «Воронеж-М», установленная в районе Орска. Станция «Днепр» в Мишелёвке была выведена из эксплуатации в 2015 году после запуска на полную мощность РЛС «Воронеж-М» в районе Усолье-Сибирского. Станция в Оленегорске будет заменена РЛС «Воронеж-ВП» в посёлке Протоки (Оленегорск-1), которую планируется развернуть к концу 2018 года.
| Узел | Расположение | РЛЯ | Координаты | Азимут | Тип | Ввод | Модернизация | Вывод | Состояние |
|---|---|---|---|---|---|---|---|---|---|
| ОС-1 | Мишелёвка | 1 | 135° | Днестр-М | 1971 | 1976 (Днепр) | 2015 | Ещё не демонтирован, заменен РЛС «Воронеж-М». | |
| 2 | 135° | Днестр-М | 1971 | 1990 | Демонтирован. | ||||
| 3 | 265° | Днестр | 1967 | 1993 () | 1990 | Используется ИСЗФ СО РАН для исследований. | |||
| 4 | 265° | Днестр | 1967 | 1990 | Демонтирован. | ||||
| 5 | 135° | Днепр | 1972 | 2015 | Ещё не демонтирован, заменен РЛС «Воронеж-М». | ||||
| ОС-2 | Сары-Шаган | 1 | 60° | Днестр-М | 1971 | 1974 (Днепр) | 1988 | Демонтирован. | |
| 2 | 60° | Днестр-М | 1971 | 1974 (Днепр) | 1984 | Демонтирован. | |||
| 3 | 270° | Днестр | 1967 | 1984 | Демонтирован. | ||||
| 4 | 270° | Днестр | 1967 | 1995 | Демонтирован. | ||||
| 5 | 152° | Днепр | 1974 | Функционирует. | |||||
| РО-1 | Оленегорск | 1 | 308° | Днестр-М | 1971 | 1978 (Днепр) | Функционирует. Ранее функционировал как передатчик для «Даугавы». У «Даугавы» разобрано всё оборудование. | ||
| РО-2 | Скрунда | 1 | 308° | Днестр-М | 1971 | 1979 (Днепр) | 1998 | Демонтирован. | |
| 2 | 308° | Днепр | 1977 | 1998 | Демонтирован. | ||||
| РО-4 | Севастополь | 1 | 200° | Днепр | 1979 | 2009 | Заброшен. | ||
| РО-5 | Мукачево | 1 | 228° | Днепр | 1979 | 2009 | Работает в составе Государственного Космического Агентства Украины. |
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
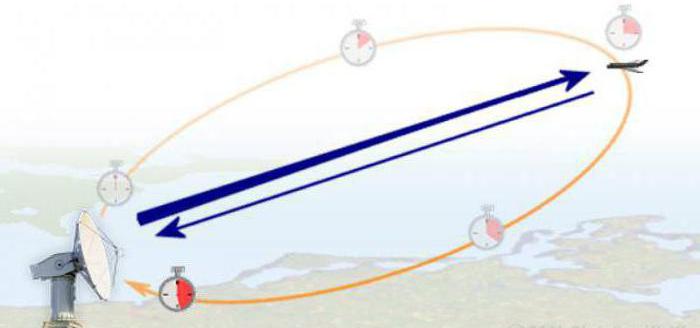
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.

В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;
- непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
https://youtube.com/watch?v=EzWo_k1MDuc
Импульсные РЛС имеют как недостатки, так и преимущества. Они могут определять дальность сразу нескольких целей, подобный радар вполне может обходиться одной антенной, индикаторы подобных устройств отличаются простотой. Однако при этом сигнал, испускаемый подобным РЛС должен иметь довольно большую мощность. Также можно добавить, что все современные радары сопровождения выполнены по импульсной схеме.

Антенна РЛС фокусирует электромагнитный сигнал и направляет его, улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, причем они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно, РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.

Основной проблемой радаров непрерывного действия является невозможность с их помощью определять расстояние до объекта, зато при их работе не возникает помех от неподвижных предметов между РЛС и целью или за ней. Кроме того, доплеровские радары – это довольно простые устройства, которым для работы достаточно сигналов малой мощности. Также нужно отметить, что современные радиолокационные станции с непрерывным излучением имеют возможность определять расстояние до объекта. Для этого используется изменение частоты РЛС во время работы.
Одной из главных проблем в работе импульсных РЛС являются помехи, которые идут от неподвижных объектов — как правило, это земная поверхность, горы, холмы. При работе бортовых импульсных радаров самолетов все объекты, находящиеся ниже, «затеняются» сигналом, отраженным от земной поверхности. Если говорить о наземных или судовых радиолокационных комплексах, то для них эта проблема проявляется в обнаружении целей, летящих на малых высотах. Чтобы устранить подобные помехи используется все тот же эффект Доплера.

Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
Характеристики
Из-за высокой чувствительности РЛС «Дарьял» (индекс ГРАУ: 5Н79, главный конструктор В. М. Иванцов) спроектирована в виде двух разнесённых на 0,5—1,5 км позиций — передающей и приёмной. Приёмная антенна представляет собой активную фазированную решётку (ФАР) размером 100×100 метров с размещёнными в ней почти 4000 крест-вибраторами, передающая антенна — активную ФАР размером 40×40 метров, заполненную 1260 сменными модулями с выходной импульсной мощностью каждого 300 кВт. Станция работает в метровом диапазоне. Она способна обнаруживать и одновременно сопровождать около 100 целей размером с футбольный мяч (ЭПР порядка 0,1 м2) на дальности до 6000 км. Зона действия — 90° по азимуту, 40° по углу места.
Модификация «Дарьял-У» (индекс ГРАУ: 90Н6, главный конструктор А. А. Васильев) отличалась пониженным энергетическим потенциалом и увеличенными возможностями по управлению им за счёт уменьшения (в 2 раза) количества передающих элементов ФАР. Использование вычислительного комплекса на базе многопроцессорной ЭВМ типа М-13 мощностью до 2,4 млрд операций в секунду позволило усовершенствовать алгоритм работы РЛС, обеспечив оптимальное распределение излучаемой энергии в режиме обзора и сопровождения цели за счёт дробления сигнала. Применение режима адаптации приёмной ФАР дало увеличение помехозащищённости (примерно в 15 раз) и разрешающей способности по дальности (в 2—4 раза). Со 150 до 15—20 км снижена минимальная дальность действия.
В модификации «Дарьял-УМ» (индекс ГРАУ: 90Н6-М, главный конструктор В. М. Иванцов) был увеличен сектор сканирования (до 110° по азимуту), уменьшены потери на его краях в приёмной позиции, а также усовершенствована конструкция передатчиков и улучшен их коэффициент полезного действия.
На стадии перевооружения
Все современные РЛС состоят из шести основных компонентов: передатчик (источник электромагнитного сигнала), антенная система (фокусировка сигнала передатчика), радиоприёмник (обработка принятого сигнала), выходные устройства (индикаторы и ЭВМ), аппаратура помехозащиты и источники электропитания.
Также по теме

«Не имеют себе равных»: как Россия создаёт уникальные средства противовоздушной обороны
В России во вторник отмечали День войсковой противовоздушной обороны. Контроль над небом — одна из наиболее актуальных задач для…
Отечественные РЛС могут засекать самолёты, беспилотники и ракеты, отслеживая их передвижение в режиме реального времени. Радары обеспечивают своевременное поступление информации о ситуации в воздушном пространстве вблизи рубежей РФ и за сотни километров от госграниц. На военном языке это называется радиолокационной разведкой.
Стимулом для совершенствования радиолокационной разведки РФ являются усилия иностранных государств (прежде всего США) по созданию малозаметных самолётов, крылатых и баллистических ракет. Так, на протяжении последних 40 лет Соединённые Штаты активно развивают стелс-технологии, которые призваны обеспечить незаметный для РЛС подлёт к рубежам противника.
Огромный военный бюджет (свыше $600 млрд) даёт возможность американским конструкторам экспериментировать с радиопоглощающими материалами и геометрическими формами летательных аппаратов. Параллельно с этим США совершенствуют средства радиолокационной защиты (обеспечение помехозащищённости) и аппараты радиолокационного подавления (создание помех для приёмников РЛС).
Военный эксперт Юрий Кнутов убеждён, что радиолокационная разведка РФ способна обнаруживать практически все виды воздушных целей, включая американские истребители пятого поколения F-22 и F-35, самолёты-невидимки (в частности, стратегический бомбардировщик B-2 Spirit) и объекты, летящие на предельно малых высотах.
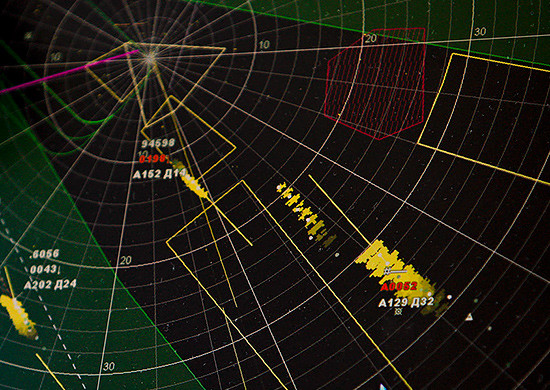
- Экран РЛС, который показывает изображение цели, синхронизированное с движением антенны
Эксперт отметил, что США не прекращают работы по развитию систем радиолокационного подавления, осознавая уязвимое положение перед российскими радарами. Кроме того, на вооружении американской армии стоят специальные противорадиолокационные ракеты, которые наводятся по излучению станций.
«Новейшие российские РЛС отличает невероятный уровень автоматизации по сравнению с предыдущим поколением. Поразительный прогресс был достигнут в улучшении мобильности. В советские годы на то, чтобы развернуть и свернуть станцию, требовались чуть ли не сутки. Сейчас это делается в пределах получаса, а иногда и в течение нескольких минут», — рассказал Кнутов.
Собеседник RT полагает, что радиолокационные комплексы ВКС приспособлены к противодействию высокотехнологичному противнику, снижая вероятность его проникновения в воздушное пространство РФ. По словам Кнутова, сегодня радиотехнические войска России находятся на стадии активного перевооружения, но к 2020 году современными РЛС будет укомплектовано большинство частей.
Примечания
- . Интерфакс (23 мая 2012).
- ↑ Иванцов В. М. (недоступная ссылка). «Воздушно-космическая оборона» (18 февраля 2011). Дата обращения 6 августа 2014.
- ↑ . ИА «Оружие России» (5 апреля 2008).
- ↑
- ↑ O’Connor, S. (англ.). Air Power Australia (2009).
- ↑
- ↑
- (недоступная ссылка). ИА «Оружие России» (6 октября 2008). Дата обращения 15 сентября 2015.
- (недоступная ссылка). ИТАР-ТАСС (13 августа 2007). Дата обращения 29 августа 2014.
- Брунтальский, П. . «Военно-промышленный курьер» (13 февраля 2008). Дата обращения 29 августа 2014.
- . Lenta.ru (15 февраля 2005). Дата обращения 29 августа 2014.
- Цыганок, А. Д. . Военно-политический анализ. «Русский Журнал» (1 апреля 2006). — Независимое экспертное мнение. Дата обращения 29 августа 2014.
- . Накануне.RU (17 января 2008). — «Мы пришли к выводу, что нужно всю эту систему держать на собственной территории.».
- . «РИА Новости» (26 февраля 2009). — «С вводом станции под Армавиром полностью решается проблема надёжного прикрытия страны от угрозы ракетного нападения с южного направления. Это сверхсовременная станция, с расширенными возможностями.».
- . Интерфакс-Украина (6 мая 2013).
- (фото, автор — Oleksa Haiworonski). Panoramio (7 ноября 2010).
- (фотопанорама). «Виртуальный Севастополь» (июль 2012).
- . «РИА Новости» (4 октября 2014).
- . «РИА Новости» (15 августа 2017).
- ↑ Михаил Ходаренок. . «РИА Новости» (2 января 2017).
- ↑ . «Военное обозрение» (16 августа 2016).
- . Lenta.ru (23 мая 2012). Дата обращения 7 августа 2014.
- . ИСЗФ СО РАН.
- . Уникальные научные установки. Портал «Современная исследовательская инфраструктура Российской Федерации».
- ↑ Holm, Michael. (англ.). Soviet Armed Forces 1945–1991 (2011).
- ↑
- ↑ Holm, Michael. (англ.). Soviet Armed Forces 1945–1991 (2011).
- (фото, автор — SityShooter; слева на фото — РЛС «Даугава»). Panoramio (1 сентября 2011).
- ↑ . Livejournal (28 октября 2010).
- ↑ . Вести.Ру (15 декабря 2009).
- . Коммерсантъ (16 января 2008).
- (англ.). Russian strategic nuclear forces (25 August 2008). Дата обращения 1 февраля 2012.
- . Regnum (27 февраля 2010).
Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.

Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).
Бомбардировочные БРЛС
| Литерное обозначение | Шифр ОКР | Заводское обозначение | Индекс | Децимальный номер | Тип | Применение | Статус |
|---|---|---|---|---|---|---|---|
| 2БС1 | радиолокационная станция | Ил-38 (в составе системы ППС «Беркут-38») | |||||
| 2БС1-Э | радиолокационная станция | Ил-38 (в составе системы ППС «Беркут-38-Э») | |||||
| 2КНI | 1.000.086 | радиолокационная станция | Ту-142МК (в составе системы ППС «2Коршун-К») | ||||
| 2КНI-Э | 1.000.086 | радиолокационная станция | Ту-142МЭ (в составе системы ППС «2Коршун-К-Э») | ||||
| ЕН | радиолокационная станция | Ту-16К-10 (в составе системы К-10У), Ту-104Ш | |||||
| ЕН-2-6 | радиолокационная станция | Ту-16К-10Н | |||||
| ЕН-Д (ЕН-М) | радиолокационная станция | Ту-16К-10Д | |||||
| ЕН-Р | радиолокационная станция | Ту-16РМ-1 | |||||
| К-1 | Кобальт | радиолокационная станция | Ту-4 (в составе РЛС «Рубидий») | ||||
| К-1М | Кобальт-М | радиолокационная станция | Ту-4, Ту-4КС, Ту-16КС (в составе СУВ К-3) | ||||
| КННI | радиолокационная станция | Ту-142МЗ (в составе системы ППС «Коршун-Н») | |||||
| ПН | радиолокационная станция | Ту-22К (в составе системы К-22У) | |||||
| ПНА | радиолокационная станция | Ту-22М2 (в составе системы «Планета»), Ту-104Ш-2, Ту-134СЛ | |||||
| ПНА-Б | радиолокационная станция | Ту-95К-22 (в составе системы «Кама») | |||||
| ПНА-Д | радиолокационная станция | Ту-22М3 (в составе системы «Планета») | |||||
| ПСБН | радиолокационная станция | Бе-6, Ил-28, Ту-83, Ту-86 | |||||
| ПСБН-М | 8 | радиолокационная станция | Бе-6М, Ил-28, Ил-28Т, Ту-14, Ту-14Т, Ту-81 | ||||
| ПСБН-М15 | радиолокационная станция | Ил-46 | |||||
| ПСБН-МА | радиолокационная станция | Як-26 | |||||
| Рубидий | радиолокационная станция | Ту-4 | |||||
| Рубидий-М-85 | радиолокационная станция | Ту-85 | |||||
| РБП-2 | Рубидий-ММ | радиолокационная станция | Ан-12, Ту-16, Ту-95, Ту-116 | ||||
| РБП-3 | радиолокационная станция | Ан-8, Ан-10, Ан-12 | |||||
| РБП-4 | Рубидий-ММ-2 | радиолокационная станция | М-4, Ту-16, Ту-16А, Ту-16КС, Ту-16Р, Ту-16С, Ту-16Т, Ту-95 | ||||
| РБП-4Г | радиолокационная станция | Ту-16 | |||||
| РБП-6 | Люстра | радиолокационная станция | |||||
| РДС | радиолокационный дальномер | ||||||
| СВР-1 | радиолокационная станция | А-57 | |||||
| СПРС-1 | Курс | радиолокационная станция | Р-1, Р-2, Ил-28, Ми-4М, Ту-91, Як-25МР | ||||
| Курс-Л | радиолокационная станция | Бе-10 | |||||
| Курс-М | радиолокационная станция | Бе-10, Ил-28Р, Ми-4М | |||||
| ЯД | 20 | радиолокационная станция | Ту-95К | ||||
| Инициатива-1 | радиолокационная станция | ||||||
| Инициатива-1Ш | радиолокационная станция | Ту-134Ш-2 | |||||
| Инициатива-2 | радиолокационная станция | Ан-8М, Ту-124Ш-2, Ту-134Ш-2 | |||||
| И-2Б | Инициатива-2Б | радиолокационная станция | Бе-12 (в составе ППС-12), Бе-14 | ||||
| Инициатива-2БН | радиолокационная станция | Бе-12Н (в составе ППС-12Н) | |||||
| И-2К | Инициатива-2К | радиолокационная станция | Ка-25ПЛ (в составе ППС «Байкал») | ||||
| Инициатива-2КМ | радиолокационная станция | Ка-27ПЛ (в составе ППС «Осьминог-ПЛ») | |||||
| Инициатива-2М | радиолокационная станция | Ми-14ПЛ (в составе ППС «Кальмар») | |||||
| Инициатива-2Р | радиолокационная станция | Як-28Р | |||||
| Инициатива-2Я | радиолокационная станция | Як-28И | |||||
| Инициатива-3 | радиолокационная станция | Як-28Р | |||||
| Инициатива-4 | радиолокационная станция | Ан-12БК | |||||
| Инициатива-4-100 | радиолокационная станция | Ан-22 (в составе ПНК-1) | |||||
| Инициатива-И | радиолокационная станция | Ту-128Б | |||||
| Кинжал | У004 | радиолокационная станция | Т8М | ||||
| Кобальт | радиолокационная станция | Ту-4 (в составе РЛС «Рубидий») | |||||
| Кобальт-М | радиолокационная станция | Ту-4 | |||||
| Обзор-К | У008 | АВ1.000.102 | радиолокационная станция | Ту-160 | |||
| Обзор-МР | радиолокационная станция | Ту-22МР | |||||
| Обзор-МС | У009 | АВ1.000.103 | радиолокационная станция | Ту-95МС | |||
| Поиск | радиолокационная станция | Ту-95МС, Ту-160 | |||||
| Орион-А | радиолокатор переднего обзора | Су-24 (в составе ПНС-24), Су-24М (в составе ПНС-24М) | |||||
| Ротор-Р | радиолокационный дальномер | ||||||
| Р-1 | Рубин-1 | радиолокационная станция | Ту-16А, Ту-16КСР, Ту-16РМ-2 | ||||
| Рубин-1А | радиолокационная станция | Ту-22, Ту-22Р, Ту-22П, Ту-22У, Ту-124Ш-1 | |||||
| Рубин-1В | радиолокационная станция | Ми-4МР, Ми-4ПС | |||||
| Рубин-1Д | радиолокационная станция | Ту-95МР | |||||
| Р-1К | Рубин-1К | радиолокационная станция | Ту-16КСР-2, Ту-16КСР-2А, Ту-16К-11-16 (в составе системы «Рубикон») | ||||
| Рубин-1КВ | радиолокационная станция | Ту-16К-26, Ту-16КСР-2-5 (в составе системы «Взлет»), Ту-95М-5 (в составе системы «Волга») | |||||
| Рубин-1М | радиолокационная станция | Ту-16КСР-2-5, Ту-16КСР-2-5-11 | |||||
| Рубин-1МЕ | радиолокационная станция | 3М-5 | |||||
| Рубин-1Ш | радиолокационная станция | Ту-134Ш-1 | |||||
| Тис | радиолокационная станция | СД-МБР | |||||
| Цезий | радиолокационный дальномер | Ту-4 (в составе РЛС «Рубидий») | |||||
| Цезий-М | радиолокационный дальномер | ||||||
| Шпиль | радиолокационная станция | Бе-10Н (в составе системы К-12У) | |||||
| У006 | АВ1.000.101 | радиолокационная станция | Ту-22М3 | опытная |
Надёжность и эффективность
РЛС семейства «Небо» относятся к типу межвидовых подвижных станций больших и средних высот. Они предназначены для обнаружения и сопровождения гиперзвуковых и аэродинамических целей, в том числе малоразмерных и малозаметных (построенных с применением технологии «стелс»). Речь идёт о боевых блоках баллистических ракет, крылатых ракетах, самолётах, вертолётах и беспилотниках.
«Небо-УМ» способна отслеживать до 200 целей одновременно на дальности от 10 до 600 км и на высоте до 80 км. Максимальная скорость сопровождаемых объектов может достигать почти 8 Махов (около 8000 км/ч).
Антенно-мачтовое устройство 55Ж6УМ является двухдиапазонным, то есть состоит из двух радаров. Первый использует метровый диапазон для установления дальности цели, второй работает в дециметровом диапазоне для определения её высоты и уточнения других координат. Полученная информация объединяется с помощью специальной автоматизированной аппаратуры. Таким образом, расчёт РЛС получает единую картину состояния воздушной обстановки.

- РЛС «Небо-УМ»
Помимо антенн, в состав «Небо-УМ» входят аппаратная кабина, система автономного снабжения (дизельная электростанция), выносное устройство (для дистанционного управления) и несколько автомобилей (до шести единиц). Основной элемент РЛС — антенно-мачтовое устройство — выполнен на трёх полуприцепах на шасси БАЗ-6909-015.
К достоинствам «Неба-УМ» относят уменьшение количества транспортных единиц, увеличение точности определения координат, повышенную устойчивость к активным помехам, эффективную систему селекции движущихся целей, улучшенное документирование радиолокационных и контрольных данных, а также трассовый способ обработки информации, который считается на текущий момент наиболее оперативным и достоверным.
Помимо этого, «Небо-УМ» является более надёжным и простым в серийном производстве комплексом. По данным сайта госзакупок, стоимость одного комплекта РЛС составляет порядка 394 млн рублей.
Первые советские радары
В 1920-е годы ученые в СССР создали импульсную радиолокационную установку и смогли с помощью отраженного радиосигнала измерить расстояние до ионосферы. В 1925 году физики Введенский, Симанов, Халезов и Аренберг указали на возможность применения для радиолокации ультракоротких радиоволн. А в 1934 году в Ленинграде начались первые полноценные опыты с аппаратурой радиообнаружения – в январе радиолокационным методом на расстоянии 600 метров был найден самолет, летящий на высоте 150 метров.
Оборудование было создано в Центральной радиолаборатории группой Ю.К. Коровина при поддержке Ленинградского электротехнического института. Руководил экспериментом военный инженер М.М. Лобанов, который сыграл ключевую роль в становлении радиолокационного направления в промышленности. В том же 1934 году на Ленинградском радиозаводе были выпущены опытные образцы радиолокационных станций (РЛС) «Вега» и «Конус» для системы радиообнаружения самолетов «Электровизор» ученого П.К. Ощепкова. Таким образом, 1934 год можно считать годом рождения первого отечественного радара.

РЛС дальнего обнаружения «РУС-2»
В 1938 году начинается серийное производство РЛС РУС-1 и РУС-2 «Редут», которые станут основой противовоздушной обороны в начале Великой Отечественной войны. Благодаря установленной на крейсере «Молотов» радиолокационной станции были отражены первые атаки немецких бомбардировщиков на Севастополь 22 июня 1941 года. А месяц спустя комплекс РУС-2, расположенный в 100 км от Москвы, обнаружил 200 самолетов, летящих бомбить столицу. Тогда атака была отражена, немцы развернулись, потеряв 22 машины.
В работе над первыми станциями РУС-1 принимал участие выдающийся физик А.А. Пистолькорс, создатель научной школы радиоэлектроники. Станция РУС-2 «Редут» выпускалась на заводе №339 и стала самой массовой РЛС времен войны.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора.
В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 масштабных азимутальных меток (для старых систем) или 16384 улучшенных масштабных азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а масштабные азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту.
Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С.
Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта масштабных азимутальных меток.
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.
Литература
- Поляков В. Т. Посвящение в радиоэлектронику. — М.: Радио и связь, 1988. — 352 с. — (МРБ. Выпуск 1123). — 900 000 экз. — ISBN 5-256-00077-2.
- Леонов А. И. Радиолокация в противоракетной обороне. — М.: Воениздат, 1967. — 136 с. — (Радиолокационная техника).
- Радиолокационные станции бокового обзора / Под редакцией А. П. Реутова. — М.: Советское радио, 1970. — 360 с. — 6700 экз.
- Радиолокационные станции воздушной разведки / Под редакцией Г. С. Кондратенкова. — М.: Воениздат, 1983. — 152 с. — 18 000 экз. — ISBN 200001705124.
- Мищенко Ю. А. Загоризонтная радиолокация. — М.: Воениздат, 1972. — 96 с. — (Радиолокационная техника).
- Бартон Д. Радиолокационные системы / Сокращённый перевод с английского под редакцией К. Н. Трофимова. — М.: Воениздат, 1967. — 480 с.
- Шембель Б. К. У истоков радиолокации в СССР. — М.: Советское радио, 1977. — 80 с.
- Водопьянов Ф. А. . Радиолокация. — М., 1946.
- Рыжов К. В. 100 великих изобретений. — М.: Вече, 2009. — 480 с. — (100 великих). — ISBN 5-7838-0528-9.
- Bowen, Edward George. Radar Days. — CRC Press, 1998. — ISBN 9780750305860.
- Центральная радиолаборатория в Ленинграде // Под ред. И. В. Бренёва. — М.: Советское радио, 1973.
- Военно-исторический музей артиллерии, инженерных войск и войск связи. Коллекция документов генерал-лейтенанта М. М. Лобанова по истории развития радиолокационной техники. Ф. 52Р оп. № 13
- Лобанов М. М. Из прошлого радиолокации: Краткий очерк. — М.: Воениздат, 1969. — 212 с. — 6500 экз.
- Лобанов М. М. Мы —— военные инженеры. — М.: Воениздат, 1977. — 223 с.
-
Лобанов М. М. Глава седьмая. О Совете по радиолокации при Государственном комитете обороны // Начало советской радиолокации. — М.: Советское радио, 1975. — 288 с.